SPI Simulator
SPI ( Serial Peripheral Interface ) - jest to synchroniczny szeregowy interfejs czteroprzewodowy opracowany przez firmę Motorola, w celu dwukierunkowej komunikacji lokalnej pomiędzy układami scalonymi. W systemie jeden układ musi pracować jako układ sterujący przepływem danych – układ nadrzędny (master), a inne układy odbierające i wysyłające dane pracują jako układy podrzędne (slave). Interfejs ten umożliwia pracę dupleksową, to znaczy że jest możliwa dwukierunkowa jednoczesna wymiana danych pomiędzy masterem a układem slave. Układy pracujące w standardzie SPI nie posiadają adresów identyfikacyjnych, dlatego też podłączenie kilku układów slave jest możliwe po zastosowaniu dodatkowego dekodera generującego sygnały selekcyjne /SS dla każdego układu slave.
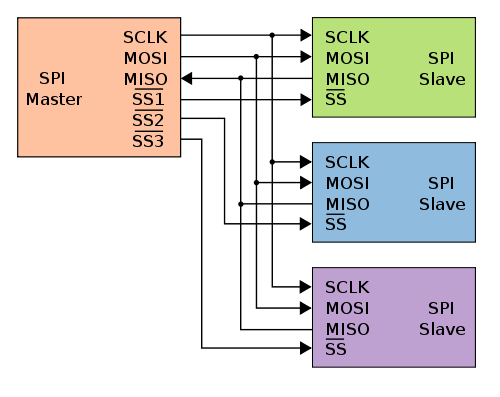
Typowe podłączenie kilku układów podrzędnych do magistrali SPI:
źródło:
en.wikipedia.org
Opis sygnałów:
SCK – sygnał zegarowy generowany
przez master
MISO – master input slave output
– wejście mastera / wyjście układu slave
MOSI – master output slave input
– wyjście mastera / wejście układu slave
/SS – zanegowany sygnał
zezwolenia, aktywny stan niski!
Najbardziej rozpowszechnione interfejsy przesyłają dane 8 i 16 bitowe, przy czym dla sterowania 16 bitowego można wybrać, który bajt danych jest wysyłany jako pierwszy. Poszczególne bajty są wyprowadzane zawsze w kolejności od bitu najbardziej znaczącego.
Prędkość gwarantowana przez standard wynosi 2.1Mbd, jednak często można spotkać układy poprawnie pracujące przy szybkościach do 10Mbd.
Interfejs SPI może pracować w jednym z czterech trybów pracy:
Mode 0:
- stan spoczynkowy sygnału zegarowego – niski
- próbkowanie MISO na narastającym zboczu sygnału zegarowego
- ustawianie MOSI na opadającym zboczu sygnału zegarowego
Mode 1:
- stan spoczynkowy sygnału zegarowego – niski
- próbkowanie MISO na opadającym zboczu sygnału zegarowego
- ustawianie MOSI na narastającym zboczu sygnału zegarowego
Mode 2:
- stan spoczynkowy sygnału zegarowego – wysoki
- próbkowanie MISO na opadającym zboczu sygnału zegarowego
- ustawianie MOSI na narastającym zboczu sygnału zegarowego
Mode 3:
- stan spoczynkowy sygnału zegarowego – wysoki
- próbkowanie MISO na narastającym zboczu sygnału zegarowego
- ustawianie MOSI na opadającym zboczu sygnału zegarowego
Poniższy aplet pozwoli rozwiać wszelkie wątpliwości związane z przesyłem danych poprzez magistralę SPI. W celu bardziej szczegółowej analizy funkcjonowania interfejsu SPI (parametry czasowe, implementacje w mikrokontrolerach itd.) proszę sięgnąć do literatury, np. do książki 'Lokalne interfejsy szeregowe w systemach cyfrowych' – Jacek Bogusz, BTC, Warszawa 2004, na podstawie której powstał powyższy opis.
Przemysław Ksel